GO ALL OUTのインタビュー企画「未来を創る起業家たち」。今回は製造業向けにロボットの移動体を使ったソリューションを提供している株式会社TriOrb代表取締役、石田秀一さんにお話をうかがいました。
人海戦術に依存する製造現場の省人化・高効率化を通じて製造業の価値を上げたい

――事業内容のご説明をお願いします。
製造業向けに、ロボットの移動体を使ったソリューションを提供しています。
近年ではAMRと呼ばれる自律移動型の搬送ロボットが注目されており、Amazonのような大型の物流倉庫では数千台ものAMRが荷物の搬送を行っています。省人化・効率化のために移動ロボットは物流業を中心に規模を問わず導入が進んでいます。
一方で製造現場では、移動ロボットの導入は広いエリアに限るなど限定的であり、実際の製造工程や搬送工程ではほとんど導入されておらず、Smart Factory化が進む現在においても人海戦術に頼っています。これは一体なぜでしょうか。
実はAMRが走行できるエリアは広大かつ段差や溝などがないフラットな床面など、走行環境に制約があるのです。製造現場は通路幅も80cm程度と狭く、床面も段差や溝など荒れています。さらに、荷物搬送やロボットが作業するためにはこれらの環境においても位置決め精度が必要になります。
私たちは従来の移動ロボットが入ることができなかった環境においても自由自在かつ高精度な移動を実現可能な移動体を提供しています。
労働生産性を向上させるためには、人々が単純な運搬作業ではなく、より付加価値の高い業務に従事することが重要です。私たちの目標は、ロボットの移動体を通じて製造現場の省人化/高効率化を促進し、製造業の価値を高めることです。
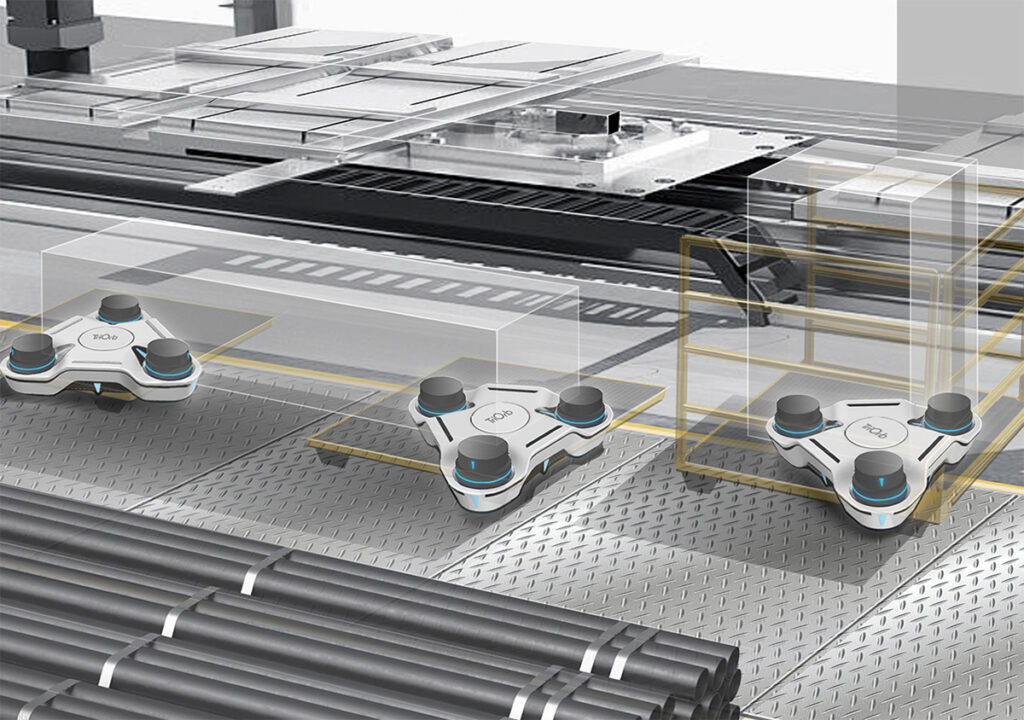
――TriOrbさんの移動体「TriOrb BASE」について教えてください。
私たちが提供する移動体「TriOrb BASE」は球を使用しており、球が転がることができる場所なら原理的にはどこでも使用可能です。各球体は約500キロまでの重さに耐えることができ、単純計算では最大1.5トンまでの重さに対応します。標準的なプラットフォームでは50cm程度のコンパクトなサイズを意識し、モータ等の出力を制限していますので、300kgの耐荷重としています。現在は1tonのタイプを開発しています。球を使用しているために、全方向に瞬時に動けるため、車のような切り返しは不要で、移動精度もミリ単位で制御可能です。
納品時には、走行路面の状態を踏まえ、球の直径やモーター出力、移動体サイズなどをチューニングし、お客様のニーズや走行環境に合わせたカスタマイズを行います。

――移動体の動きを考えたときには、「TriOrb BASE」のような三角形がベストなんでしょうか?
球を正三角形の頂点に配置し、かつその間にモーターを配置することで、モーターの効率を最大限に活かし、シンプルな構造を実現しています。この配置により、モーターの無駄遣いがなく、球が精度良く動き、必要な量だけ正確に動かすことができます。この構造が、自分たちが持つ特許技術です。さらに、格好良い「ものづくり」を目指して、これまでにないデザインを採用しました。
TriOrbが解決、実現可能なこと
――TriOrbさんが提供するソリューションで解決可能な課題はどのようなものでしょうか?
今、引き合いが多いのは二つです。
ひとつは、「TriOrb BASE」に荷物を載せて運搬する工程間搬送、もうひとつは、「TriOrb BASE」にアームをつけて、製造装置の中の物を取ったり、現場で作業を行うモバイルマニピュレータへの実装です。
後者については、他社の従来のロボットが地面に固定されたアームを使用しているのに対し、当社の製品ではアームを自由に動かすことができ、多様な作業に対応できます。
――運搬するだけではなくさまざまな作業に対応可能なんですね。
アームにさまざまな機能を付けることで、検査などの作業もできます。また、これまでご説明した単体での作業だけではなく、平面内を自由自在かつ精度よく移動できる特性を生かし、陸上でのドローンのように、単独で動くだけでなく、複数台のロボットとの連携した機能発現が可能です。
例えば、900キロの荷物を運ぶ必要がある場合、従来は専用の大型配送ロボットが必要でしたが、そういった大きなロボットは日常的にあまり使われませんし、重量に応じて専用設備を複数台用意する必要があります。クレーンやフォークリフトの使用は危険を伴い場所も取りますが、コンパクトで精度良く動ける移動体を使えば、わずか数メートルの移動にクレーンなどの重機を使う必要がなくなります。
――他に実現できそうなことはありますか?
さまざまな可能性はありますが、「ここに(当社の製品が)あれば便利だろう」と思われるケースには、まだ積極的に取り組んでいません。新しい動き方をするロボットは魅力的に見えるかもしれませんが、そのことだけで高い価格を支払うことに対し、お客様が躊躇してしまうのではないかと考えています。そのため、私たちはより戦略的に案件を選んでいき、まずは、私たちの移動体がなければ困るような状況に焦点を当てて事業を進めたいと考えています。
――会社名「TriOrb」はこの三角形の移動体が由来でしょうか?
私たちの技術の核心である「3つの球」と「3つのモーター」を会社名「TriOrb」で表現しています。「Tri」は3つ、「Orb」は球という意味です。会社のロゴもこのコンセプトに基づいており、3つの球を意識した球形のデザインになっています。
人間と同様の作業が可能なロボットを最大限活用できる業界を探すのに苦労

――現在の事業に取り組むきっかけをお聞かせください。
大学4年のとき、卒業論文のテーマで球を使った移動ロボットの研究を開始しました。その当時、私は「ロボットの足」としての移動体の製作に取り組んでおり、研究成果として病院/福祉やサービス業などにも試作機を開発しました。
大学院修了後は公的研究機関に入所し、生産現場での製品/装置の異常診断技術の開発に従事し、約10年間多くの民間企業様と一緒に共同研究を行ってきました。私が作業していたのは製造現場そのものでしたので、当然ロボット導入はほぼされておらず、人海戦術に依存し生産性向上に苦しむ現場を多くみてきました。その時に私はこれまで研究開発をしてきた移動ロボットを活用した製造業のアップデートに取り組んでみたいと考えました。
会社設立の4年前、文部科学省管轄の科学技術振興機構(JST)が運営するスタートアップ設立支援プロジェクトに選出されました。このプロジェクトは、大学や研究者が持つ革新的な技術(シーズ技術)を用いて、ベンチャーキャピタルの支援を受けながらビジネスの事業化を目指すもので、九州工業大学の恩師ともにプロジェクトに取り組み、事業開発を進めてきました。
プロジェクト終了と同時に会社を設立しました。当時は自身が経営者として携わることまでは考えておらず、研究者としてスタートアップに携わるものだと思っていました。しかしながら、設立に向けて様々な方と意見交換する中で、技術開発を行ってきた自分自身が社会実装まできちんとやりとげたいという想いが強くなり、経営者としての参画を決意し、仲間を集め2023年2月に会社を登記し、4月から事業活動を開始しました。
――2008年を起点とした15年くらいの取り組みの間、苦労されたことはありますか?
研究自体は仕事というか自身の生活と密着したものであるため、その部分での苦労は特に感じませんでした。最も難しかったのは、私たちのロボットの特徴を活かせる適切な分野を見つけ、その分野で事業化が可能な製品を開発することでした。移動体ですので多くのフィールドで応用が可能ですが、私たちだからこそ生かせるフィールドかつ、その困りごとに再現性があるのかいかに解像度を上げることができるか、これを強く意識しました。
産業現場で使える全方向移動機構のリーダーを目指す
――競合製品に比べての優位性を教えてください。
競合製品と比較すると、当社の製品は50cm×50cm×15cmのサイズで、より薄く、コンパクトな設計になっています。製造現場ではTriOrb BASEが持つ「小型かつシンプル」は非常に強い武器になります。我々のアプローチは、適用範囲を拡張するのにいたずらにロボットを大きくするのではなく、複数の小型ロボットを協調的に使用し、それぞれの機能を相互補完し合い、新たな機能を発現していくことです。
私たちが扱う全方向移動機構は米国で発明されて約50年経ちますが、これまで主に学術分野で使用され、産業界ではほぼ採用されていません。産業界で広く採用されなかった主な理由は、外乱に弱く、複雑な機構のため、十分な精度で動かすことが難しいという点でした。現在、私たちはこの全方向移動機構を産業現場で精度良く使えるように開発し、この分野でのリーダーとなることを目指しています。
――製品の普及に向けて、どのような戦略をお考えですか?
当社の製品は基本的に展示会を通じて実際に機構のシンプルさや移動性能をご覧になって頂くという販売促進を行っています。製造プロセスの改善を検討中の企業や、自社の生産方法を見直したいと考えている部門の担当者から多くの関心をいただくことが多いです。展示会では、実際に製品が稼働している様子をご覧いただき、お客様に製品のイメージを具体的に伝えています。
――これを踏まえ、将来取り組みたいと考えていることがあれば、教えてください。
製造業における課題を解決することを通じて、単なる物品の運搬に留まらない、より高度な作業やデータ収集を行うロボットの活用を進めていきたいと考えています。ロボットが工場内で連携し、さまざまな作業を遂行できる環境を構築していきたいです。
さらに将来的には、より広範な分野で活動を展開し、ロボットが現場においてより多くの役割を果たせるようになればと考えています。製造業以外にもさまざまな現場でロボットが動き回り、作業やデータ収集を行うことで、新たなビジネスの可能性を求めていきます。
――将来のロボットは、今我々が想像してないようなことができるかもしれませんね。
例えば、映画「アイアンマン」に登場する「ジャーヴィス」のように、ロボットが提案や作業をサポートする協力的なパートナーとなる未来も想像できます。単なるロボットの単独作業ではなく、「人とロボットの共存」を目指すことが重要だと考えています。私たちは、人を補完し、より高品質な製造を実現するために、ロボット技術を活用していくことを目標としています。
株式会社TriOrb
https://triorb.co.jp/

